|
|
| Home | Hardware | Projects | Code and datasets | Links |
Distributing principal componentsThe Principal Component Analysis (PCA), a compression method widely used in statistical anaylsis and image processing, can be efficiently implemented in a network of wireless sensors. PCA proves to be particularly suitable to sensor networks as it allows to reduce the network load while retaining a maximum amount of variance from sensor measurements. At least two operating modes can be designed, unsupervised and supervised, allowing (i) to extract a maximum of variance while keeping the network load bounded, and (ii) to reduce the network load while keeping the approximation error bounded, respectively (work sumbitted). The current purpose of this research track is to design a fully distributed implementation for the computation of the principal components. Student involved: Sylvain Raybaud References: [1] A. Hyvarinen, J. Karhunen, and E. Oja. Independent Component Analysis. J. Wiley New York, 2001. [2] K. Diamantaras and S. Kung. Principal component
neural networks: theory and applications. John Wiley [3] I. Jolliffe. Principal Component Analysis. Springer, 2002.
|
||||||||||||||||||||||||||||
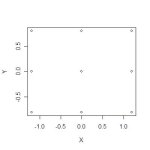
LocalizationThe goal of this project is to study and share experimental results obtained for the localization problem using TMote Sky wireless sensors, whose CC2420 radio is compliant with the IEEE 802.15.4 emerging standard for WSN. Using multidimensional scaling (MDS), considered as a competitive algorithm for localization in WSN, we compare localization performances obtained with CC2420 radio by using RSSI (Received Signal Strength Indicator) and LQI (Link Quality Indicator) as indicators for estimating sensor nodes pairwise distances. While RSSI has been part of low power radio hardware for a few years, and is the indicator usually used for localization, LQI is more recent, and few studies have so far compared these indicators in localization problems. Ongoing experiments also aim at automatically tuning the transmission power of the CC2420 radio to different levels in order to improve the localization accuracy. Student involved: Mathieu Van Der Haegen Download data and code from the master thesis. It includes:
References: [1] J. Costa, N. Patwari, and A. Hero. Distributed multidimensional scaling with adaptive weighting for node localization in sensor networks. ACM Transactions on Sensor Networks (TOSN), vol. 2, no. 1, pp. 39–64, 2006. [2] K. Whitehouse and D. Culler. A robustness analysis of multi-hop ranging-based localization approximations. Proceedings of the fifth international conference on Information processing in sensor networks, pp. 317–325, 2006. [3] Presentation at Machine Learning Group - December 2006 (in French). [PDF]
|
||||||||||||||||||||||||||||
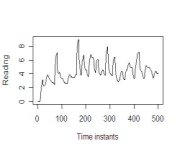
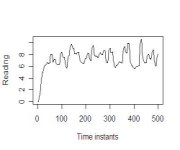
Prediction models for wireless sensor networksUse of prediction models in sensor networks proves to be efficient with respect to energy savings, as it allows sensors whose readings are predicted to remain in their idle mode, thereby consuming orders of magnitude less energy that in the active mode. In the context of continuous monitoring, where a set of sensors is typically required to regularly send their readings to a central server, an interesting approach consists in splitting the set of sensors in two subsets, such that readings of one subset are used to predict readings of the second subset. An approach for finding such a subset was proposed in [1]. This project pursues this research track, the goal is to identify several sensor subsets for predictions, that are used in turn in a round robin fashion. Identification of different sensor subsets allows to detect erroneous models or sensor failure, and to better distribute energy consumption. More detailed can be found in [2], and in the following presentation [3]. References: [1] A. Desphande, C. Guestrin, S. R. Madden, J. M. Hellerstein, and W. Hong. Model-driven data acquisition in sensor networks, Proceedings of the 30th VLDB Conference, Toronto, Canada, 2004. [PDF] [2] Y. Le Borgne, G. Bontempi. Round Robin Cycle
for Predictions in Wireless Sensor Networks. [3] UCL Microelectronics course, Louvain La Neuve, Belgium - February 2006. [PDF]
| ||||||||||||||||||||||||||||
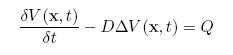
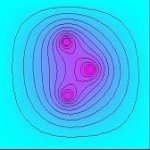
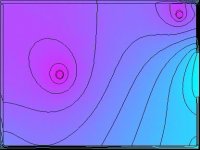
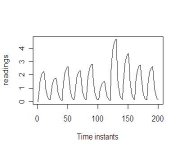
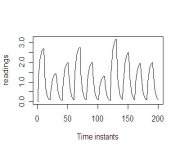
"Environmental modeling for synthetic data generationAs real world deployments of wireless sensor networks (WSN) are cost and time consuming, few real world data sets exist for assessing data processing architectures for WSN. Goal of this work is to use PDEs to provide realistic synthethic datasets for testing WSN data processing algorithms. A large panel of natural environmental variations, such as temperature, humidity, chemicals concentration, vibrations, pressure, and so forth, can be modelled by using adequate sets partial differential equations. These page currently provides some examples and MATLAB codes we used for generating data of diffusion processes. Diffusion processes: Diffusion processes can be modelled by the following parabolic equation:
Where V(x,t) is the measure of interest (over space and time), D the diffusion coefficient and Q the medium activity. For example, for heat propagation, D would be the heat diffusivity and Q the ratio of the heat source in Joule over the heat capacity of the medium. Construction of an environment requires associating to each element of the environment adequate D and Q parameters, and defining boundary conditions for the outer boundaries (Dirichlet or Neumann conditions). Scenarios: These examples were done using the MATLAB Partial Differential Equation toolbox.
| ||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||
| Contact person: Yann-Aël Le Borgne - Machine Learning Group - ULB Computer Science Department | ||||||||||||||||||||||||||||
| |

|